
A tecnologia embarcada nos veículos cresce a cada dia e com ela cresce também a quantidade de equipamentos nos veículos. Só para citar um exemplo, há alguns anos precisávamos de uma quantidade pequena de fios para atender o nível de equipamentos de um veículo, hoje precisaríamos de dezenas de quilômetros de fios para atender, por exemplo, um veículo com aproximadamente trinta módulos de controle, isso sem a utilização de redes veiculares.
Por conta desse aumento de tecnologia, muitas montadoras implantaram as redes veiculares em seus veículos. O tipo de rede mais utilizado é a Rede Can, rede que foi desenvolvida pela Bosch e atualmente é utilizada pela maioria das montadoras. Algumas marcas como a Peugeot e a Citroën utilizam rede em 100% dos veículos fabricados, mesmo aqueles que não têm nível alto de equipamento.
Para que possamos entender o que são e como funcionam essas redes veiculares, vamos dar um exemplo: Um veículo pode ser dividido em dois setores importantes, o primeiro, o que chamamos de cofre do motor, ou seja, tudo o que se refere à parte mecânica (motor transmissão, suspensão, freios), o segundo, o que chamamos de compartimento interno do veículo (sistema de iluminação, conforto e equipamentos de carroceria). Agora vamos analisar uma situação: um veículo que na parte de aplicação mecânica é equipado com sistemas de injeção eletrônica, ABS e caixa de velocidade automática com gerenciamento eletrônico. Esses sistemas necessitam de um sinal em comum, no caso o sinal de velocidade. Numa solução clássica o que pode se fazer é instalar um sensor para cada equipamento, em outra solução o ABS recebe o sinal de velocidade através dos sensores de roda, utiliza esse sinal para o seu mapa de controle e o disponibiliza através da rede para que todos tenham acesso a esse sinal.

Imaginemos que esse mesmo sinal de velocidade, que na rede é transmitido através dos dois condutores representados na figura 1, pode também ser usado por outros módulos, por exemplo, o painel de instrumentos que irá indicar para o condutor a velocidade do veículo. Por isso é que quando se fala de rede se fala em aumento de funções, diminuição de fios e simplificação dos chicotes, diminuição de conectores e facilidade de diagnóstico. Como seria um veículo com vários módulos eletrônicos distribuídos entre a mecânica e a carroceria, sendo que cada módulo executa rotinas importantes e precisa de muitos sinais de entrada para gerenciar o sistema que lhes diz respeito. Sem o sistema de rede seria possível fazer isso tudo acontecer? Sim, mas teríamos o inconveniente de ter que instalar um grande número de sensores, conectores e fios para que cada módulo cumprisse suas funções, só não se pode garantir que o diagnóstico seria fácil, nem que as funções fossem cumpridas com tanta facilidade como são nos veículos equipados com redes.
A rede CAN de alta velocidade para aplicações mecânicas é uma rede que atinge até 1Mbits/s de velocidade de transmissão. Em geral os módulos são unidos por dois fios que juntos denominamos de BUS, os fios na rede Can são chamados de CAN High e CAN Low, ou seja, nível alto e nível baixo.
A transmissão de dados é feita através da codificação binária, os módulos podem se comunicar através de tramas, que são sequências de bits que possuem um padrão quanto à sua estrutura. Podemos dizer que as tramas são como sentenças que têm começo, meio e fim.

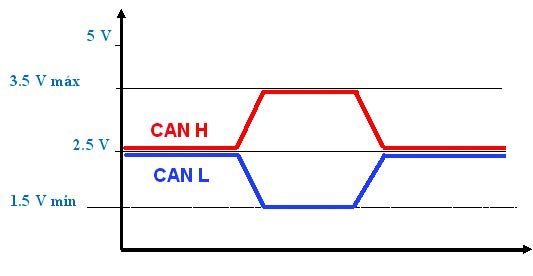
Os bits dessa sequência são traduzidos no Bus através de níveis de tensão, sendo que na rede CAN de alta velocidade o fio com nível alto oscila entre as tensões de 2,5 V para nível lógico zero e 3,5 V para nível lógico um, já o fio com nível baixo oscila entre as tensões de 1,5 V para nível lógico zero e 2,5 V para nível lógico um, e o fio que é chamado de fio lógica e o fio CAN Low, o Can High sempre estará no nível inverso ao fio lógica.
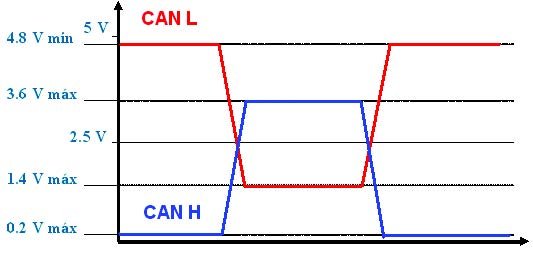
Na rede CAN de baixa velocidade para aplicações de carroceria, temos as mesmas características da rede de alta velocidade, porém os níveis de tensão são diferentes, conforme figura 4, além das velocidades serem menores.
A rede CAN de alta velocidade é bastante resistente a interferências, mas não transmite em caso de degradação nos fios, já a rede CAN de baixa velocidade é uma rede que tem resistência a interferências e aceita degradação nos fios sem prejuízo de transmissão de dados. Essa rede só não aceita o rompimento dos dois fios do Bus.
Existem também redes veiculares complementares à rede CAN, dentre essas redes podemos citar a rede LIN, que é um tipo de rede que é utilizada para controle de dispositivos não críticos, como por exemplo, faróis direcionais, limpadores, ar-condicionado, etc… Essa rede tem a velocidade de 19,2 Kbts/s, possui um fio só e não aceita degradação, é uma rede muito utilizada na Europa, porém no Brasil já está sendo utilizada em algumas montadoras, como por exemplo, a Citroën e a Peugeot.
A reparação em veículos que são equipados com redes deve ser feita por profissionais qualificados, por isso torna-se cada vez mais necessário o aperfeiçoamento profissional.
*Instrutor da Escola Senai “Conde José Vicente de Azevedo”


