Para reparar o sistema de auxílio ao motorista é necessário conhecimento de eletrônica embarcada.
Caro amigo reparador, tudo bem? Que bom estar contigo em mais uma edição da Revista Reparação Automotiva. Para este mês, volto a um tema antes apresentado, ADAS – Sistema de Assistência ao Motorista.
Hoje a crescente busca por tecnologias que entreguem segurança, conforto e autonomia aos veículos, a eletrônica embarcada floresceu de forma tão rápida, que o profissional reparador de automóveis precisa desdobrar-se em estudos e capacitação para manter-se no mercado.
Um dos Sistemas que tem atraído a atenção das oficinas é o ADAS.
Afinal, para trabalhar com ADAS, é somente apreender calibrar e comprar a torre de apresentação dos alvos?
Aqui posso lhe dizer: NÃO!
O sistema é mais complexo. Demanda tempo, espaço, equipamento liberado e atualizado, entre outros.
Porém, o maior obstáculo está em conhecer o sistema, sua funcionalidade e sua interligação com todo o sistema embarcado do veículo.
ADAS, MUITO ALÉM DA CALIBRAÇÃO! Bem, vamos entender e compreender desde o início. A década de 1990 foi o verdadeiro caldeirão da engenharia automotiva moderna.
Foi o período em que os veículos deixaram de ser predominantemente mecânicos com
auxílios eletrônicos isolados e passaram a ser sistemas computacionais sobre rodas.
Abaixo, detalho como a explosão da eletrônica embarcada e a união das montadoras criaram a infraestrutura de comunicação necessária para que os sistemas de assistência ao motorista saíssem do papel.
- O Boom da Eletrônica Embarcada nos Anos 1990
Até o final dos anos 1980, cada novo recurso eletrônico adicionado ao veículo (como injeção eletrônica, freios ABS ou painel digital) operava como uma “ilha isolada”. Cada sistema tinha seu próprio módulo de comando (ECU), seus próprios sensores dedicados e próprios chicotes elétricos. Com a chegada dos anos 1990, duas pressões globais forçaram uma mudança radical:
- Leis de Emissões Rigorosas: A introdução de legislações como o padrão OBD-II nos EUA (tornando-se obrigatório em 1996) e o Euro 1 na Europa exigiu um controle milimétrico da queima de combustível, do tratamento de gases e do diagnóstico de falhas em tempo real.
- Complexidade e Peso do Chicote: Se as montadoras continuassem a ligar cada módulo de forma analógica e direta (fio a fio), o chicote elétrico de um veículo de luxo se tornaria tão pesado, grosso e complexo que inviabilizaria a linha de montagem e adicionaria um peso morto catastrófico ao veículo.
2. O Consórcio entre Montadoras:
A Padronização das Redes de Comunicação, para resolver o caos dos chicotes elétricos e viabilizar a troca de informações em tempo real, as montadoras e gigantes das autopeças perceberam que precisavam parar de desenvolver soluções proprietárias e criar um padrão universal.
O maior marco dessa era foi a consolidação e aplicação em larga escala da Rede CAN (Controller Area Network), desenvolvida inicialmente pela Bosch nos anos 1980, mas adotada em massa pelas montadoras a partir da década de 1990.
A Aliança para o Desenvolvimento
Grandes consórcios internacionais e comitês de padronização (como a ISO e a SAE) uniram montadoras rivais (Mercedes-Benz, BMW, Volkswagen, Volvo, GM, Ford), para definir os protocolos de comunicação automotiva. Essa cooperação resultou em normas fundamentais:
- ISO 11898: Padronizou a rede CAN para aplicações de alta velocidade (Powertrain e Segurança).
- Consórcio LIN (Local Interconnect Network): No final dos anos 1990, um consórcio formado por BMW, Volvo, Audi, VW, DaimlerChrysler, Motorola e Volcano Communications criou a rede LIN, um protocolo de baixo custo e menor velocidade para gerenciar funções de conforto (retrovisores, vidros elétricos, ar-condicionado), sem sobrecarregar a rede CAN principal.
- O Compartilhamento de Dados e a Sinergia Inter módulos: A implementação do barramento de rede trançado (geralmente CAN High e CAN Low) permitiu que um único sensor compartilhasse sua informação instantaneamente com múltiplos módulos. Isso mudou completamente o jogo do diagnóstico e da dinâmica veicular.
A implementação do barramento de rede trançado (geralmente CAN High e CAN Low) permitiu que um único sensor compartilhasse sua informação instantaneamente com múltiplos módulos. Isso mudou completamente o jogo do diagnóstico e da dinâmica veicular.
Exemplo Prático de Sinergia nos Anos 1990:
O Sensor de Velocidade de Roda (do ABS) não servia mais apenas para o ABS soltar o freio. Na nova arquitetura de rede:
O módulo do ABS lia a velocidade da roda, essa informação era enviada para a Rede CAN.
O módulo da Injeção Eletrônica (ECU) lia o dado e controlava o torque do motor (base do Controle de Tração).
O módulo da Transmissão Automática (TCU) recebia o dado para decidir o momento exato da troca de marcha.
O Painel de Instrumentos capturava a mesma mensagem para mover o ponteiro do velocímetro.
Hoje, podemos ver esta interligação na tela do Scanner em um Diagrama de blocos, que chamamos de TOPOLOGIA:
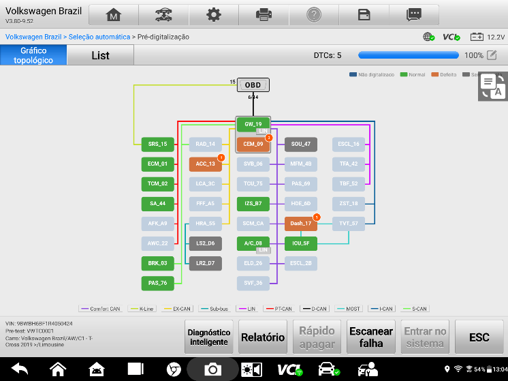
Cada coluna representa sistemas interligados, subdivididos entre segurança, conforto, dirigibilidade, entre outros.
4. O Pré-ADAS Proporcionado pelas Redes de Comunicação
Sem essa teia de comunicação rápida, estável e padronizada pelos consórcios, os sistemas avançados de assistência ao motorista teriam sido impossíveis de implementar de forma comercial.
É nos anos 1990 que nasce os primeiros sistemas que “enxergavam” além do carro:
- O Controle Eletrônico de Estabilidade (ESP/ESC – 1995): Lançado comercialmente pela Bosch, Mercedes-Benz e BMW, o ESP exigia que o módulo de estabilidade controlasse ativamente a pressão de frenagem de cada roda individualmente e, ao mesmo tempo, solicitasse à ECU do motor a redução imediata do torque se o veículo detectasse uma perda de trajetória (subesterço ou sobresterço). Essa comunicação ultrarrápida entre freio e motor só era possível via CAN.
- O Piloto Automático Adaptativo (ACC – 1999): Quando a Mercedes-Benz introduziu o sistema Distronic baseado em radar de 77 GHz no Classe S (W220), o sensor de radar montado na grade frontal precisava conversar diretamente com o módulo do motor (para acelerar) e com o módulo do ABS/ESP (para frear o carro de forma autônoma se o tráfego à frente parasse).
E o ADAS?
Dizer que o ADAS surgiu em um único ano definitivo é difícil, pois ele é o resultado de uma evolução gradual. No entanto, a engenharia automotiva e a indústria de segurança consensualizam o ano de 2000 (e o início da década de 2000) como o marco do surgimento definitivo do ADAS moderno.
O motivo dessa escolha não é comercial, mas técnico: foi quando os veículos deixaram de apenas reagir à própria dinâmica interna e passaram a tomar decisões ativas baseadas na percepção em tempo real do ambiente externo.
Abaixo estão os marcos que consolidaram essa virada de chave definitiva:
1. O Divisor de Águas: A Introdução da Visão Computacional (2000-2002)
Até o final dos anos 1990, os sistemas de auxílio usavam apenas radares micro-ondas (como o pioneiro Distronic da Mercedes-Benz em 1999) ou sensores ultrassônicos de estacionamento. O ADAS se torna “definitivo” quando as câmeras de vídeo e os processadores de imagem entram a bordo.
O Ano 2000 – Pioneirismo da câmera:
A Subaru introduziu no Japão (no modelo Legacy Lancaster), o sistema ADA (Active Driving Assist). Pela primeira vez, usou-se um arranjo de câmeras estéreo (duas câmeras no para-brisa funcionando como olhos humanos) capazes de identificar faixas de rodagem e pedestres, disparando alertas de mudança de faixa e frenagem de emergência.
Ano 2002 – A popularização do processamento inteligente:
A empresa israelense Mobileye começou a testar e fornecer seus chips de processamento de imagem de câmera única (EyeQ) para grandes montadoras. Esse chip conseguia, de forma computacional, separar o que era um carro, o que era uma linha de sinalização e o que era um objeto estático.
2. A Evolução Crítica da Arquitetura Multiplexada
Como vimos na década de 1990, as redes CAN se consolidaram. Em 2000, os módulos já tinham velocidade de processamento e velocidade de transmissão de dados (banda) suficientes para que a informação de uma câmera ou radar gerasse uma ação física imediata:
Antes de 2000 (Avisar): O sistema detectava o perigo e emitia um bip ou acendia uma luz no painel (Assistência Passiva).
A partir de 2000 (Agir): O sistema calculava o risco, cortava o acelerador e mandava o módulo de freio pressurizar o sistema de forma autônoma (Assistência Ativa).
3. O Reconhecimento Oficial das Classificações (SAE)
Para organizar essa explosão tecnológica que se consolidou a partir de 2000, a SAE International (Sociedade de Engenheiros Automotivos), formalizou mais tarde os Níveis de Automação (0 a 5).
O ADAS definitivo estabeleceu-se como a tecnologia que rege os Níveis 1 e 2:
Nível 1 (Assistência ao Condutor):
Onde o sistema executa ou o controle lateral (manter na faixa), ou o controle longitudinal (frear/acelerar). Consolidado entre 2000 e 2010.
Nível 2 (Automação Parcial):
Onde o veículo executa ambos os controles simultaneamente sob supervisão do motorista (Ex: ACC + Centralização de Faixa trabalhando juntos).
Por isto, digo ADAS, é muito além de uma calibração.
O que mais recebo é pedido de treinamento em calibração ADAS, porém a pergunta que devolvo ao interessado em nossos treinamentos é:
Qual seu conhecimento de eletrônica embarcada e redes de comunicação?
Afinal, calibrar é simples, com scanner preparado, espaço físico ideal, torre com alvos, você irá calibrar seguindo o passo a passo do sistema. O problema está em quando a calibração não resolve. Vamos a um exemplo prático.

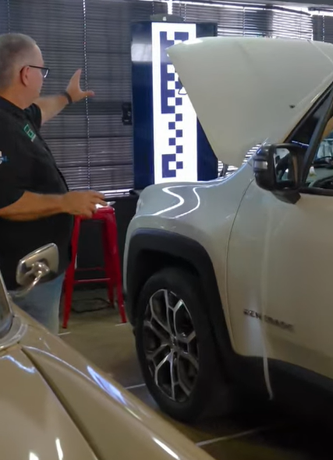
Caso 1
Veículo: Jeep Renegade
Falha: câmera do para-brisas, não funciona.
Solução apresentada pelo cliente: Foi substituído o para-brisas, depois a câmera, porém o veículo não aceitava calibrar o sistema.
Defeito real: Módulo de ABS/ESP.
Sim, o módulo de ABS/ESP, uma vez em que o veículo não tinha informações corretas, o sistema de assistência ao motorista não funciona, apresenta um dtc de não ajustado, ou calibrado corretamente.
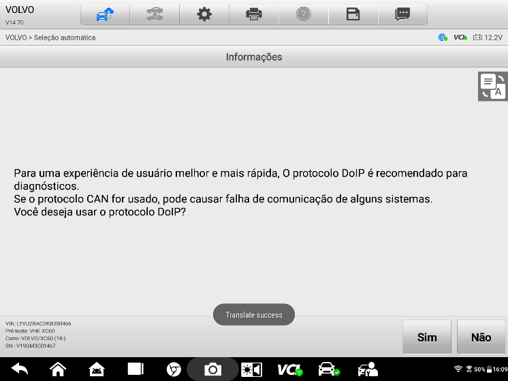
Caso 2
Veículo: Volvo C40
Defeito: após troca do para-brisas, não foi possível calibrar a câmera corretamente. Cliente recebeu o diagnóstico de necessidade de troca da câmera. Ao recebermos o veículo, identificamos, que a calibração necessita de equipamento com acesso online via protocolo DOIP.
Ou seja, não é qualquer equipamento, ainda que liberado o pacote ADAS, irá atender todas as demandas, é necessário atender os protocolos de comunicação da montadora.
Assim, repito, ADAS é além da calibração!
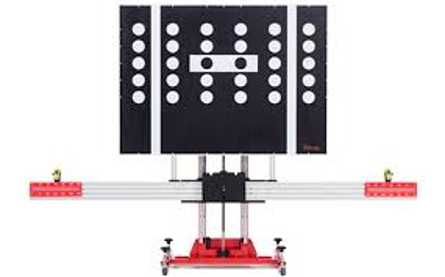
Para fecharmos as informações, apresento um resumo, do processo de calibração utilizando os equipamentos da AUTEL, fornecidos pelo representante oficial da marca GYNPROG Brasil, de Goiânia.
1- Posicionamento do veículo:
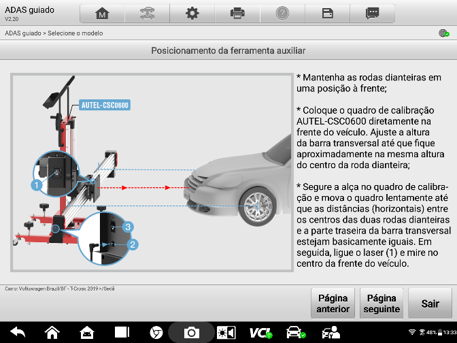

O sistema fornecido pela GYNPROG Brasil, tem o diferencial do ADAS digital, que traz uma economia considerável em pacotes de targets (alvos), utilizando uma tela junto a torre.
Chegamos ao final de mais uma edição, espero te encontrar na próxima, onde traremos mais informações atualizadas do setor automotivo. Não se esqueça:ADAS, é muito além da calibração!

Professor de manutenção automotiva, pós-graduado em Engenharia de Manutenção, com 34 anos de experiência. Proprietário da General Tech, oficina premium em Uberaba/MG.
Confira as principais notícias do setor no portal da Revista Reparação Automotiva.


